SuitX is a startup company working on medical and industrial Exoskeletons. The company was created out of Homayoon Kazerooni's lab at UC Berkeley.
While competing in the Robotics For Good Competition in Dubai, with the wheelchair project, I met several members of suitX another team competing After getting to know the suitX team over the course of the competition they offered me a summer internship, thus I spent the summer in Berkeley. Over the four months I was at suitX I had the chance to work with their medical, industrial and marketing teams.
As a part of their Medical Exo Team I updated, modified or designed all thirteen boards on the suit, resulting in a new run of PCBs and a new Exo Suit Revision. I also unified the electrical parts library, established design standards and practices and added revision control.
I assisted the Industrial Engineering Team review and update electrical designs going into production. I also unified the electrical part library, PCB standards and workflow with those established for the Medical Exo Team.
Although My work with suitX went beyond that of an Electrical Engineering Intern, extending to collaborating with the Marketing Team. In addition to weekly interactions with investors and outside partners visiting suitX, I attended two outreach events one at the Construction Expo and another at Google Ventures
Project Chiron
Project Chiron is a Self Driving Wheelchair being developed for people with severe physical disabilities at the Oregon State University Personal Robotics Group.
The project was started with the goal of creating a low cost ($500-$1500) add-on kit for a standard power wheelchair that allowed self driving capabilities. While the system does only cost $1000 (without sensors). The current cost of high quality sensors along with the complexities of navigation in an unknown environment and minimal room for error makes a low cost kit not currently possible. Instead we have focused on what can be accomplished now that there is a computer on board with sensors, location and navigation. Including learning a users driving style. home automation integration and augmenting user driving to make it safer.
Go Baby Go
Go Baby Go is a national community-based research design and outreach program that provides modified ride-on cars to children birth to age 3 who experience limited mobility. The program began in 2012 with founder Cole Galloway at the University of Delaware. Integrating assistive technology, families, clinicians and industry partners, the program provides children with disability the opportunity for movement, mobility and socialization and has been expanding ever since.
The systems originally only provided a simple button for turning on and off the motor but no way to tack usage. Working with the Oregon State Go Baby Go Project and members of the Personal Robotics Group, designed and implemented add on to the current kit tracking overall usage. Having this tracking data not only helps the researchers but also the users, showing powered mobility will hopefully make a case for a full time chair through insurance. More features and simpler integration is currently being developed.
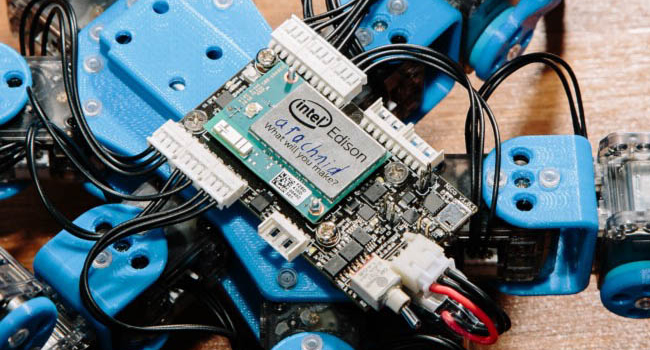
Intel Hexapod
The Intel Hexapod project was a project I worked on my Senior year at Oregon State University. The goal of the project was to integrate the Intel Hexapods running a custom control board, dynamixel servos and an Edison with ROS.
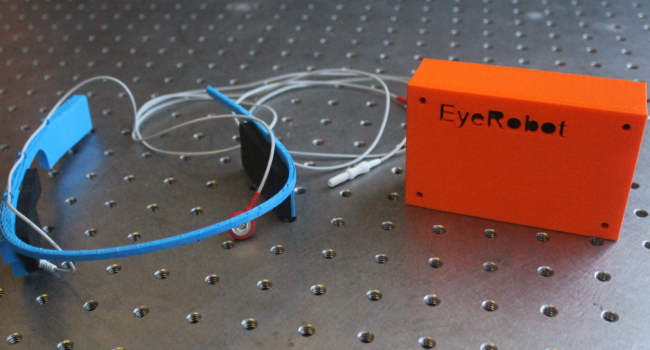
Electrooculography E-Stop System
For those who fall victim to ALS (Amyotrophic Lateral Sclerosis) or similar progressive, incurable diseases moving even a wheelchair becomes impossible. Motor Diseases such as these often cause a person to quickly lose motor control and thus lose the ability to drive any type of machine usually used for assistance. In conjunction with the Personal Robotics Lab at Oregon State University who are developing a wheelchair that can drive itself using way points set by eye tracking equipment our project would provide an emergency stop for those who can not physically hit a button but are still in control of heavy machinery. We seek to create a mobile head set that measures the electric potential across the eyes. Based on two sensors placed on the temples, the voltage signifies whether the patient is looking left or right. By measuring the spike in voltage difference, we will implement an emergency stop. To accomplish this we will be required to design a circuit board with voltage amplifiers and filters along with a USB microcontroller to process the signal. The signals read by the micro controller are routed to a software system that will calibrate, collect and process signal data from the electrodes.
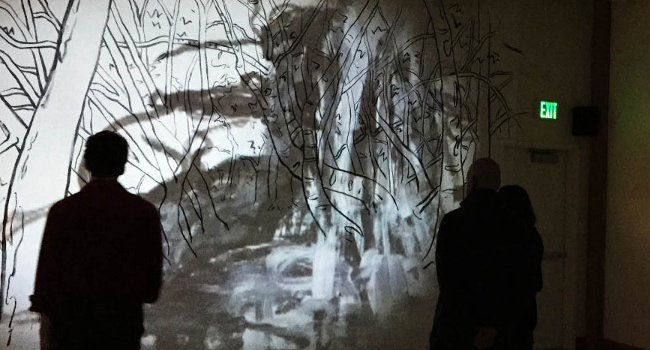
Lost
(Lost) In the Woods is a multidisciplinary, interactive animated installation created by visual artist Shelley Jordon in collaboration with musician/composer Kurt Rohde.
This project explores the experience of being “lost” in the woods from the perspective of emotion, metaphor and the psychological. Spanning three galleries, the installations combine hand-painted animations, 2-D artwork, and live-action videos with original music and sound. The paintings are activated with projected animations and sounds as people walk to specific points in the installation. Additional animations appear in unexpected places, comprised of chance images accompanied by sound and music.
The project is a unique collaboration between roboticists from Oregon State University's Personal Robotics Lab (Bill Smart and Benjamin Narin) and Visual artist Shelley Jordon and sound artist Kurt Rohde. It brings together engineering and art to create an immersive interactive experience that is unique to each viewer.
Robots In Theater
Robots In Theater is a test for the 2015 summer production of a Midsummers Nights Dream. A set of three scenes were selected to test both the actors and robots ability to act together. while the show never happened, the project was an interesting cross disciplinary experiment.
Action Jackson
Action Jackson is a Jackson Pollock painting robot designed to explore robots in art. Action Jackson was used to make artwork for the 150 year anniversary for the Mechanical, Industrial and Manfacturing Engineering School (MIME) at Oregon State. Although a silly robot, the project was a great demo piece to show off the robotics program at Oregon State to non techincal visitors.
Arcimoto
For my High School's Senior Project I interned for a start up electric car company based in Eugene, Oregon named Arcimoto. During my time at Arcimoto I worked on a number of projects, notably designing the front and rear light packages and LED highlighting.
OSU Stories
Lorem ipsum dolor sit amet consectetur.
First Item Mathavan Jaya. This is bright and spacious design perfect for people or startup companies looking to showcase their apps or other projects.
You can download the PSD template in this portfolio sample item at FreebiesXpress.com.
OSU Studies Artificial Intelligence
Lorem ipsum dolor sit amet consectetur.
First Item Mathavan Jaya. This is bright and spacious design perfect for people or startup companies looking to showcase their apps or other projects.
You can download the PSD template in this portfolio sample item at FreebiesXpress.com.
PAC-12 Conference of Champions: Oregon State
Lorem ipsum dolor sit amet consectetur.
First Item Mathavan Jaya. This is bright and spacious design perfect for people or startup companies looking to showcase their apps or other projects.
You can download the PSD template in this portfolio sample item at FreebiesXpress.com.
OSU Studies Artificial Intelligence
Lorem ipsum dolor sit amet consectetur.
First Item Mathavan Jaya. This is bright and spacious design perfect for people or startup companies looking to showcase their apps or other projects.
You can download the PSD template in this portfolio sample item at FreebiesXpress.com.
Best Wishes To Former Intern Benjamin Narin
Lorem ipsum dolor sit amet consectetur.
First Item Mathavan Jaya. This is bright and spacious design perfect for people or startup companies looking to showcase their apps or other projects.
You can download the PSD template in this portfolio sample item at FreebiesXpress.com.
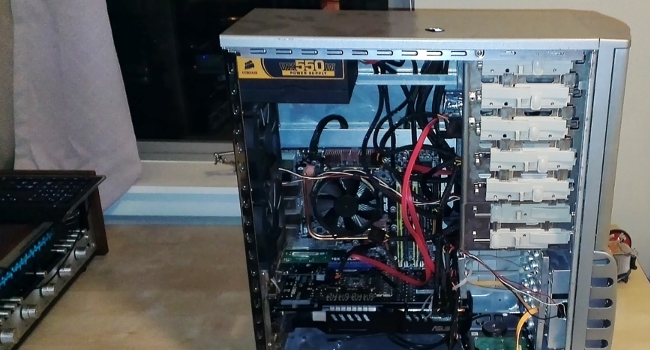
Personal Computer Build
During Spring of 2016 I built my second personal
desktop. Since the previous system I was running was from freshman year of high school the upgrade was needed.
The new system runs a 6700k Intel Processor, 32GB of
RAM, a 512TB SSD and a 760 GTX.
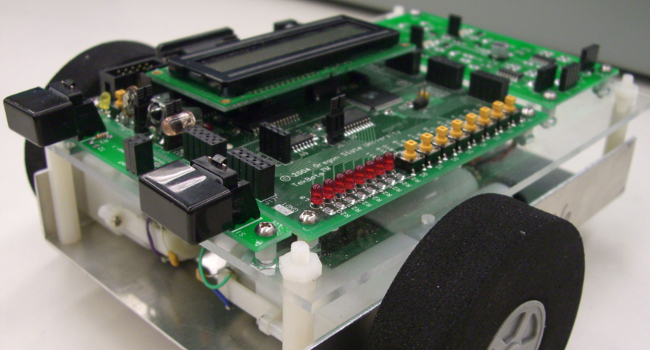
Self Driving RC Car
After seeing a number of RC Robotic Car projects
I decided to build my own. I found a rolling chassis
for a Traxxas E-Max and originally planned to modify
the ackerman steering to skid steer but after looking at
the design of the chassis I decided to keep the steering.
I prototyped a similar system for class but it was deployed
on a different RC car. My hope is that is the final system
will hack a normal RC car ESC and will be simple to drop on to
any "supported" car and ESC.
Home Network
I have long been interested in networking but mostly
as a means to an end. Only in recent years have I started
to learn more about both my home network and masters research.
My current home network runs a pfsense router, a unmanaged switch and an Unifi Pro Access Point.
On the network I have static IP addresses for most devices and severs along with a dhcp server to
handle the rest. In addition I am running a Vpn Server for connecting to my internal network
from outside my local network. I hope to continue to evolve my current network with plans to add
QOS, a guest wifi on a separate subnet and bonded links for higher throughput from my desktop to my NAS.
Network Attached Storage (NAS)
My Home NAS has been an on going project for the
past few years. For a long time I wanted somewhere that
I could easily back up files without having to worry about
running out of space, bit rot or hard drive failure.
The NAS I built uses a micro ITX server board, 6 3TB
hard drives and 16 gb of ecc memory. I decided on using freeNAS
and ZFS2 to provide two drive redundancy. In addition by running
FreeNAS I am able to use the Jails to provide other services.
OSU Mars Rover
I joined the Oregon State University (OSU)
Mars Rover Team Freshman year. Upon joining I was elected to be the lead of electronics on the rover. Over the next
two years I along with a team of undergraduates built
a robot to compete in the University Mars Rover Challenge.
Archlinux
After learning about Linux back in High School
I did the normal progression from Ubuntu to many different
distributions and finally to something a little more custom
which in my case was Archlinux. While I much prefer Arch
over Ubuntu, my constant use of the Robot Operating System (ROS)
over the past few years has required me to keep it around.
By using Arch I have had the chance to learn more about low
level Linux (nothing is setup for you) and troubleshooting for
both Linux and the boot loader.
Teleoperated Blimp
During Freshman of college two friends and I entered in
a electrical engineering school competition to build
a project using parts from Tekbot (the lab kit store).
While most people choose to modify the robots provided, we decided
to build a Blimp. The project exceeded all our expectations
and the blimp flew great, barring any slow breeze. We won
awards in all three categories we were able to
compete in.
Mini Bot
The minibot project is something I worked on my
Junior/Senior year of High School. It was my first
robotics personal project.
First Personal Computer
Freshman year of high school I built my first computer.
Up until that point I had been using my families computer.
The system I built ran a q6600 with
a whole 4 GB of ram (I splurged for an extra 2GB) and
a 500GB hard drive. The system I built ended up lasting me
eight years instead, through both high school and college.
First Robotics Competition
In high school I participated in the First
Robotics Competition (FRC). My Freshman year I joined
a group of Junior and Senior friends who were starting
an FRC team. During my four years on the team I transitioned
the team from a group of friends to a sustainable team that
still competes yearly.
First Lego League
While in middle school I participated in the FLL competition.
In our first year we won the Directors Award and got to compete at
the State Competition.
Hi my name is Benjamin, I am a roboticist with a MSc in Robotics and a double BS in Computer Science and Electrical Engineering from Oregon State University. I am intereststed in practical applications of robotic technology and currentlywork as a contractor at Google Research.